






Флагман Института Альфреда Вегенера (Alfred Wegener Institute), ледокол Polarstern начал дрейф вместе с льдиной размером 2,5 на 3,5 км в тысяче км к северу от острова Котельный. В рамках экспедиции MOSAiC, целью которой является изучение Арктической климатической системы, ледокол будет около года вморожен в лед, пока Трансарктическое течение не вынесет его в пролив Фрама. Различные устройства и приборы, включая НПА, будут задействованы в разнообразных экспериментах. Другой ледокольный НИС, который тоже вскоре станет носителем НПА, пока только получил имя Sir David Attenborough на торжественной церемонии. Ходовые испытания планируются на март 2020 г.
https://www.mosaic-expedition.org/


На военном параде по случаю 70-летия образования КНР, среди множества беспилотных комплексов различного назначения, были показаны два подводных аппарата под названием HSU001. Одним из первых китайских АНПА, разработанным в Шеньянском институте автоматики был Explorer. В 1994 г. этот аппарат погружался до глубины 1000 м недалеко от Парасельских островов.
http://english.sia.cas.cn/au/hy/201908/t20190814_214110.html


Крупнейшая японская судоходная компания NYK Line провела первое в своем роде испытание автономного надводного корабля (MASS - Maritime Autonomous Surface Ship) в соответствии с руководящими принципами IMO для таких испытаний. Автомобилевоз Iris Leader с экипажем в полном составе и системой управления SSR (Sherpa System for Real ship) испытывался на некоторых участках недельного перехода из Китая в Японию. Комитет по безопасности на море (IMO MSC) сформировал экспертную группу по автономным судам весной прошлого года, а временное руководство (Interim Guidelines for MASS trials) опубликовал в июне нынешнего. Хотя работа по проекту Ultra-Automatic Ship Project велась в Японии в 1983–1988 гг., одно из первых экспериментальных автономных плавсредств – Artemis ASC (Autonomous Surface Craft) было построено в 1993 г., в рамках программы MIT Sea Grant College Program.
https://www.youtube.com/watch?v=QUKbMA5sjSA
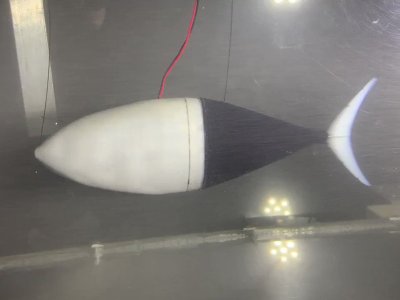
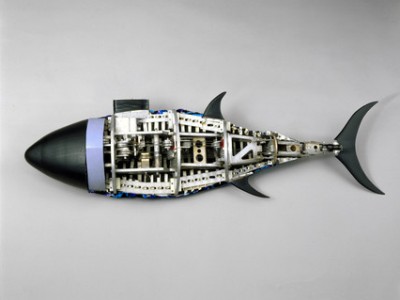
Статья о рыбоподобной платформе Tunabot вышла в сентябрьском выпуске Science Robotics. Инженеры из University of Virginia и биологи из Harvard University выяснили, что робот может плавать так же быстро, как и тунец. Работы по теме эффективности движителя типа рыбьего хвоста (Propulsive Efficiency of a Flexible Hull Underwater Vehicle) велись с начала 1990-х в MIT и привели к созданию платформы RoboTuna.
https://robotics.sciencemag.org/content/4/34/eaax4615
Обзор подготовил Д.Г.Ляхов


